

Sie folgen nun
Fehler beim Folgen des Nutzers.
Dieser Nutzer erlaubt es nicht, dass andere Nutzer ihm folgen.
Sie folgen diesem Nutzer bereits.
Ihr Mitgliedschaftsplan bietet nur 0 Folgen an. Upgraden Sie hier.
Erfolgreich entfolgt
Fehler beim Nichtfolgen des Nutzers.
Sie haben erfolgreich empfohlen
Fehler beim Empfehlen des Nutzers
Ein Fehler ist aufgetreten. Bitte aktualisieren Sie die Seite und versuchen Sie es erneut.
E-Mail erfolgreich bestätigt.

abbottabad,
pakistan
Es ist derzeit 10:06 PM hier
Beigetreten am Oktober 21, 2018
5 Recommendations
Nigar A.
@Glactico7
5,5
5,5
83%
83%
abbottabad,
pakistan
96 %
Abgeschlossene Arbeiten
84 %
Budgetgerecht
96 %
Pünktlich
20 %
Wiedereinstellungsrate
Ph.D | Control systems | Robotics | Latex | UAVs
Kontaktieren Sie Nigar A. bezüglich Ihres Jobs
Melden Sie sich an, um Details im Chat zu besprechen.
Portfolio
Portfolio
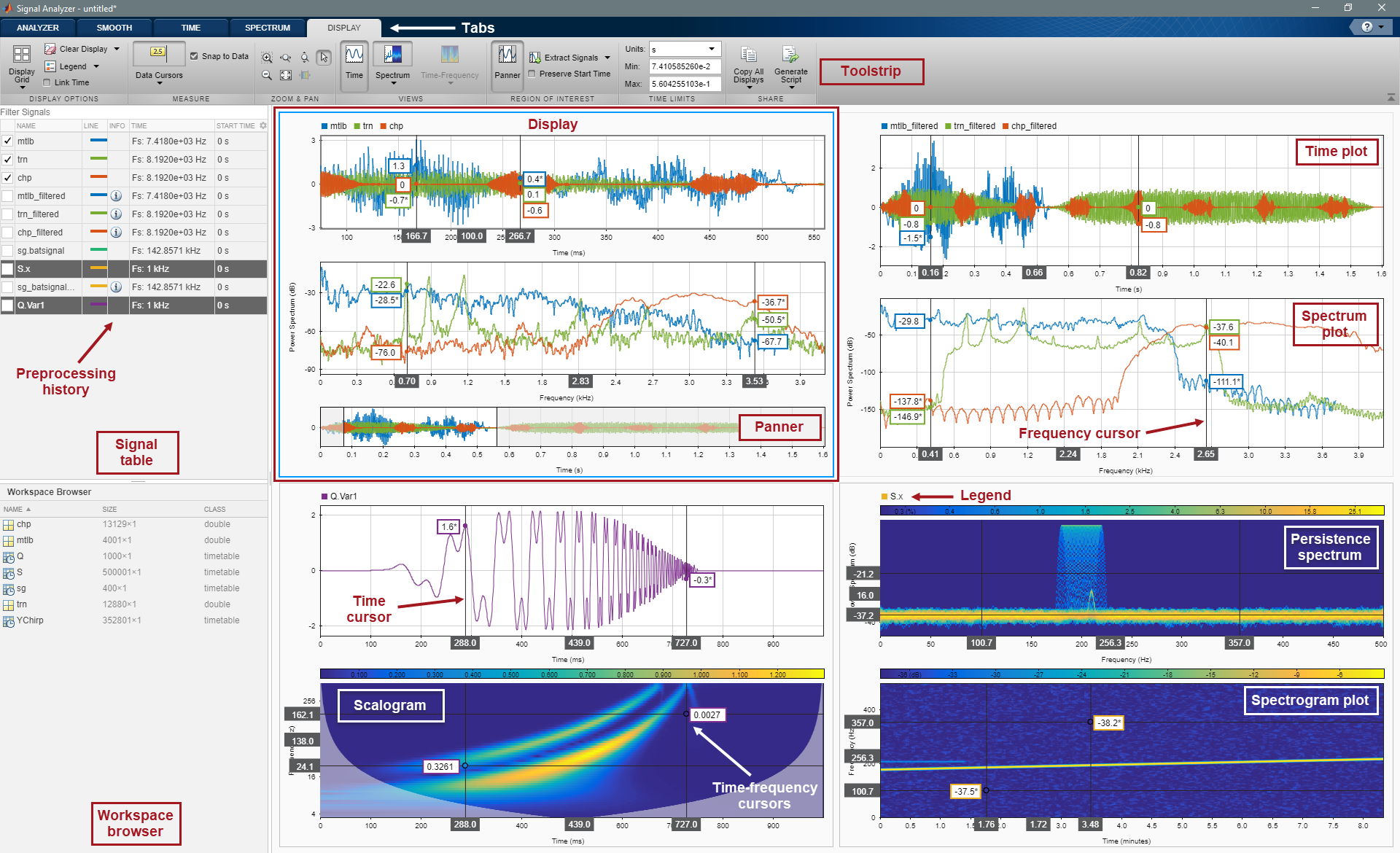

Signal Analyzer in MATLAB workspace - Simulink
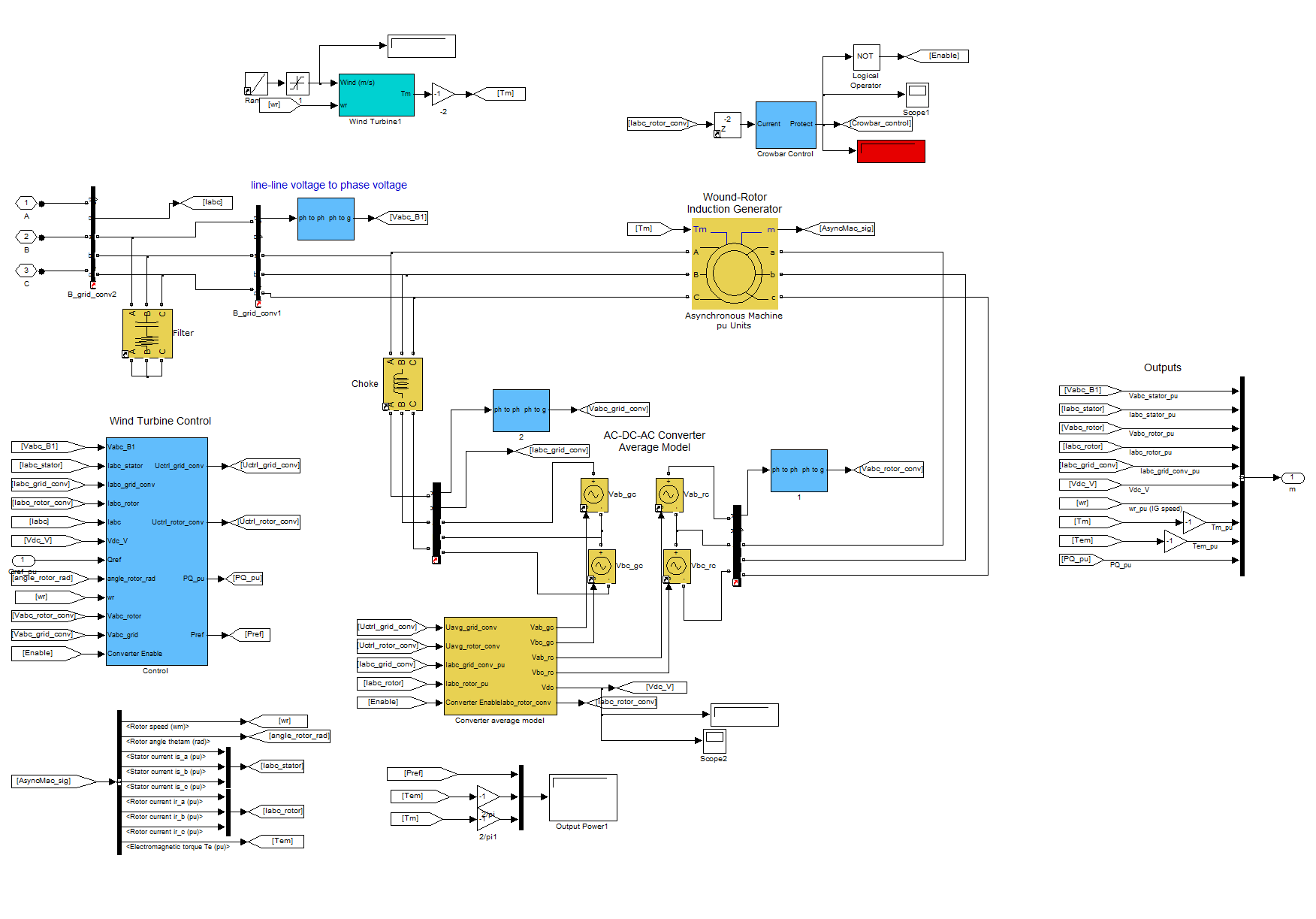

MATLAB - Simulink Model of Electrical System
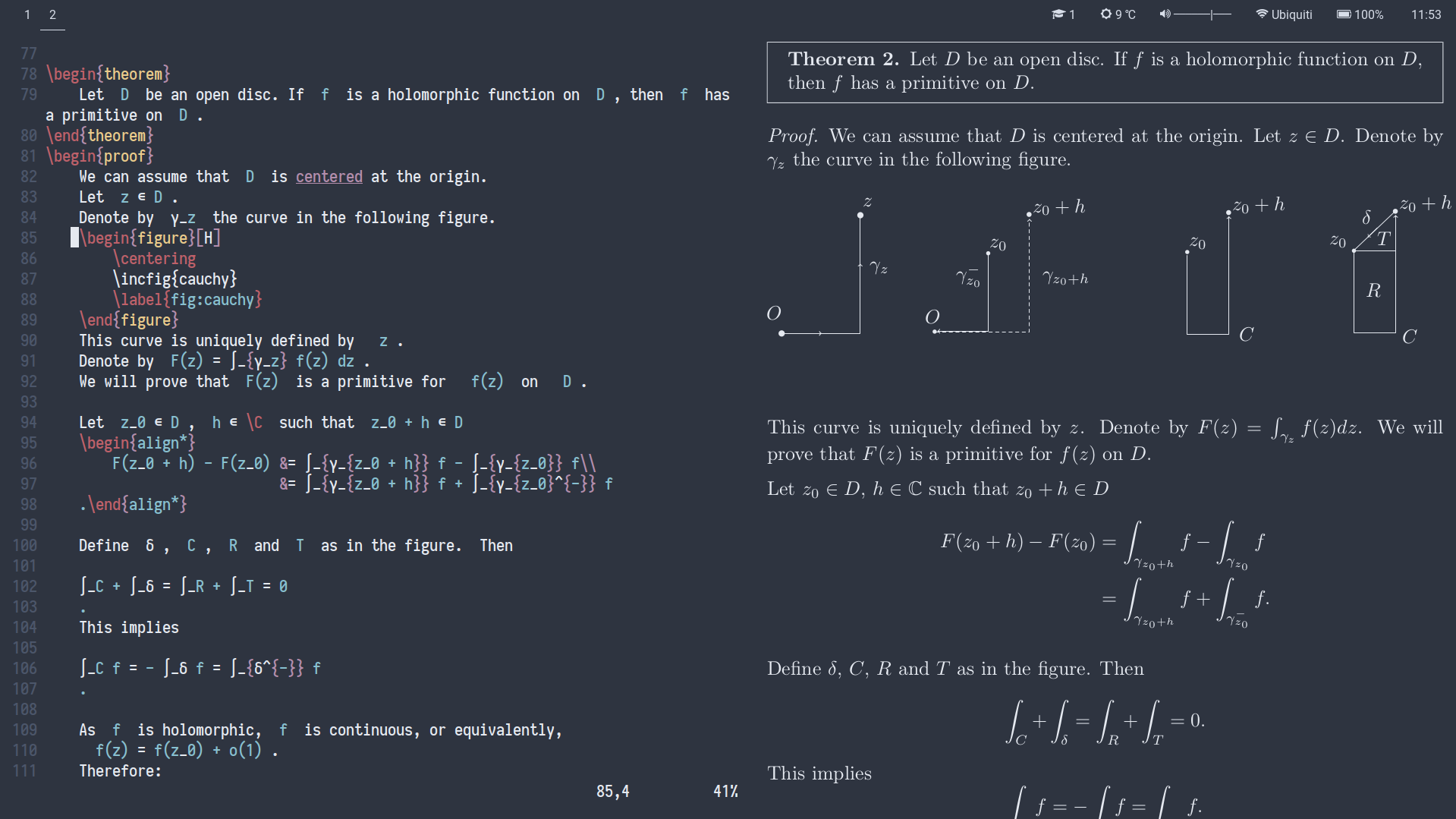

Latex Writing and Mathematics Equation
Signal Analyzer in MATLAB workspace - Simulink
MATLAB - Simulink Model of Electrical System
Latex Writing and Mathematics Equation
Bewertungen
Änderungen gespeichert
Zeigt 1 - 5 von 46 Bewertungen
$60,00 USD
Engineering
Matlab and Mathematica
Mechanical Engineering
Electrical Engineering
+1 mehr
R

•
$75,00 USD
Engineering
Matlab and Mathematica
Mechanical Engineering
Electrical Engineering
+1 mehr

•
$20,00 USD
•
$130,00 USD

•
$250,00 CAD
C

•
Ausbildung
Masters in Electrical Engineering (Control Systems and Automation)
(2 Jahre)
Bachelor's in Electrical Engineering (Power)
(4 Jahre)
Veröffentlichungen
Disturbance Observer Based Tracking Control of Quadrotor With High-Order Disturbances
IEEE Access
In research paper, flight control of UAV drone is developed along with the the development of high-order disturbance observer for the estimation and rejection of disturbances of various kinds.
Link to Publication: https://ieeexplore.ieee.org/document/8950178
Attitude Tracking Control of Quadrotor with Disturbance Using Sliding Mode Method
IEEE_
Attitude tracking control for UAV quadrotor in discrete time and continuous time domain.
Link to the publicaition: https://ieeexplore.ieee.org/document/8688181
Sliding mode control for quadrotor with disturbance observer
SAGE - Advances in Mechanical Engineering
To design flight control algorithm for UAV Quadrotor drone in the presence of exogenous disturbances.
Link to the publication: https://doi.org/10.1177/1687814018782330
Kontaktieren Sie Nigar A. bezüglich Ihres Jobs
Melden Sie sich an, um Details im Chat zu besprechen.
Verifizierungen
Zertifikate
Top-Fähigkeiten
Ähnliche Freelancer anschauen
Ähnliche Vorzeigeprojekte ansehen
Einladung erfolgreich zugesendet!
Danke! Wir haben Ihnen per E-Mail einen Link geschickt, über den Sie Ihr kostenloses Guthaben anfordern können.
Beim Senden Ihrer E-Mail ist ein Fehler aufgetreten. Bitte versuchen Sie es erneut.
Das Kopieren in der Zwischenablage ist fehlergeschlagen, bitte nach Anpassung Ihrer Berechtigungen erneut versuchen.
In der Zwischenablage kopiert.
Vorschau wird geladen
Erlaubnis zur Geolokalisierung erteilt.
Ihre Anmeldesitzung ist abgelaufen und Sie wurden abgemeldet. Bitte melden Sie sich erneut an.